

Un projet de recherche suggère que c’est beaucoup plus compliqué que prévu






Tout le monde sait comment un vélo reste droit – les forces gyroscopiques induites par les roues qui tournent et «l’effet de roulette» créé par le sentier. Ou le font-ils ? Une équipe d’ingénieurs affirme qu’il est prouvé que les vélos peuvent rester debout même sans ces éléments.
- Comment choisir la géométrie d’un vélo de route
- Repousser les limites du déport de fourche : une expérience
- Progrès récents dans la géométrie du VTT
Bien qu’il soit généralement admis depuis des décennies que ce sont les deux facteurs qui maintiennent votre vélo droit, l’ingénieur d’origine anglaise Jim Papadopoulos et ses collègues suggèrent qu’un vélo sera stable même si ces deux forces ne sont pas présentes.
Papadopoulos pense que deux études bien acceptées du 20e siècle sur l’auto-stabilité des vélos contiennent des erreurs. Il travaille avec une équipe internationale de quatre ingénieurs (JDG Kooijman, JP Meijaard, Andy Ruina et AL Schwab) pour prouver dans le monde réel qu’un vélo est autostable même sans l’influence de ces deux forces. Pour annuler l’effet gyroscopique, ils ont utilisé des roues contrarotatives sur un vélo d’essai, et pour éliminer l’effet stabilisateur de la piste, ils ont rendu la piste négative.
«Notre travail», explique Papadopoulos, maintenant professeur assistant à la Northeastern University de Boston, «consistait à trouver les bonnes équations et à prouver que les affirmations largement acceptées n’étaient pas exactement vraies. Par conséquent, nous encourageons les concepteurs à jouer avec des limites autrefois interdites comme la traînée négative et la direction verticale. Ce n’est pas nécessairement mieux, mais ils ne doivent pas non plus supposer que ce doit être pire.
Alors, que sont exactement les forces gyroscopiques et la traînée de fourche ?
L’effet gyroscopique est la tendance d’une roue qui tourne à résister à l’inclinaison. En fait, c’est un peu plus compliqué que cela : lorsque vous essayez de déplacer une roue qui tourne dans une dimension, elle exerce une force de réaction qui tente de la déplacer dans une dimension différente. En 1910, les mathématiciens Felix Klein, Fritz Noether et Arnold Sommerfeld ont écrit un livre en quatre volumes sur les gyroscopes, dans lequel ils soutenaient que l’effet gyroscopique est ce qui fait qu’un vélo s’auto-stabilise en mouvement.
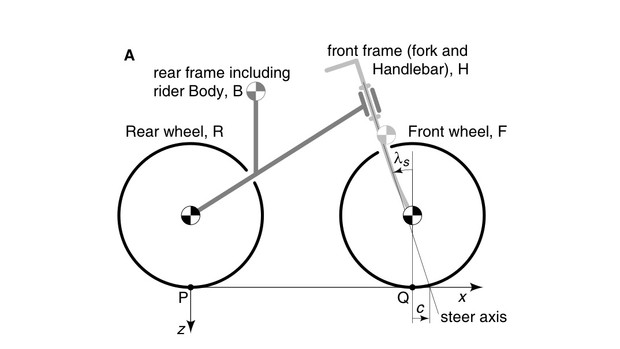
Le sentier de la fourche, en revanche, est quelque chose que nous pouvons voir sur les chariots d’épicerie. Si vous déplacez le chariot dans n’importe quelle direction, la roulette (comprenant un axe de direction et une roue) suivra toujours le chariot, comme un chien en laisse. Cela se produit parce que le point de contact au sol de la roue se trouve derrière le point de contact au sol de l’axe de direction, une distance également connue sous le nom de « traînée » (étiquetée « C » dans l’illustration ci-dessus). C’est comme si l’axe entraînait la roue dans son mouvement.
La chose intéressante par rapport aux vélos, qui n’ont que deux points de contact avec le sol, c’est que cela signifie que la roue avant entre automatiquement dans un virage lorsqu’un vélo en mouvement se penche – il s’auto-corrige. En 1970, le chimiste et écrivain britannique David Jones a construit un vélo sans effet gyroscopique, et il a conclu que l’auto-stabilité d’un vélo est due à la traînée de fourche.
Cependant, Papadopoulos et son équipe disent qu’il y a des erreurs dans les deux études mentionnées ci-dessus (années 1910 Über die Theorie des Kreisels sur l’effet gyroscopique sur l’auto-stabilité des vélos par Felix Klein, Fritz Noether et Arnold Sommerfeld ; et années 1970 La stabilité du vélo sur l’effet castor par David Jones). Dans l’étude précédente de 1910, l’équipe indique qu’il y avait des erreurs de signe qui, une fois corrigées, diminuent l’importance des forces gyroscopiques. Et dans l’étude ultérieure de David Jones, l’équipe dit que ses calculs étaient basés sur un vélo immobile, plutôt qu’en mouvement.
Les efforts de l’équipe ont abouti à deux articles, le plus théorique Équations dynamiques linéarisées pour l’équilibre et la direction d’un vélo : une référence (2007), et les plus pratiques et époustouflantes Un vélo peut être autostable sans effets gyroscopiques ou de roulette (2011).
Quoi d’autre pourrait aider votre vélo à rester droit lorsqu’il est en mouvement ?

C’est là que ça se complique, car il n’y a pas d’accord commun sur la relation exacte des différents facteurs qui aident à maintenir un vélo droit lorsqu’il est en mouvement. C’est un domaine passionnant de la théorie de la conception de vélos, et incroyable de penser que malgré l’émergence du vélo de sécurité à la fin du 19e siècle, la relation exacte entre ces forces n’est toujours pas connue avec certitude.
En plus des forces gyroscopiques et de la traînée de fourche, il y a aussi le centre de masse, qui est l’un des domaines clés mis en évidence par Papadopoulos et ses collègues. Vous avez peut-être remarqué qu’il est beaucoup plus facile de faire du vélo sans les mains lorsqu’il est équipé d’une longue potence, car le poids du guidon est plus en avant que la roue avant. Et n’oubliez pas la longueur de l’empattement, qui aide à garder votre vélo stable à grande vitesse.
« Si vous regardez les vélos d’aujourd’hui », déclare le professeur Arend Schwab, l’un des co-auteurs du rapport et ingénieur biomécanique à l’Université de technologie de Delft aux Pays-Bas, « ils semblent presque identiques à ceux fabriqués vers 1890, lorsque les scientifiques se sont d’abord penchés sur l’auto-stabilité du vélo.

La bicyclette a commencé à évoluer vers 1820 avec Karl Drais et son modèle le dandy-horse, ou la draisine. Ceux-ci étaient très différents des « vélos de sécurité » qui sont arrivés vers 1890. Avec des roues de même taille, une transmission par chaîne et des pneumatiques, le vélo de sécurité ressemblait beaucoup aux vélos que nous conduisons encore aujourd’hui : ce que nous avons l’habitude d’appeler « diamant- vélos à cadre ou cadres à double triangle.
On pourrait dire que la raison pour laquelle cela n’a pas beaucoup changé est que ces concepteurs ont à peu près raison il y a cent ans. Bien sûr, les constructeurs de vélos de montagne ont joué avec une géométrie plus extrême, modifiant l’angle de tête, le décalage de la fourche et la taille des roues, qui affectent tous la piste, mais le cadre du vélo de route n’a pas beaucoup changé dans la disposition ou la géométrie de base. Bien que le vélo de sécurité manquait d’un tube de selle solide pour commencer.
La chose importante à noter de tout cela, cependant, est que selon Schwab, toute conception de vélo stable peut être rendue instable simplement en modifiant l’un des paramètres clés (effet gyroscopique, traînée de fourche, répartition des masses). De plus, la plupart des conceptions instables peuvent être rendues stables simplement en modifiant les trois mêmes paramètres.
La lenteur du changement
Les raisons de la lenteur du développement sont essentiellement doubles. Premièrement, les cadres à double triangle (qui ont un triangle à l’avant composé du tube supérieur, du tube de direction, du tube diagonal et du tube de selle, et un à l’arrière de la chaîne et des haubans) sont très solides par rapport à tout autre type de cadre. Deuxièmement, l’instance dirigeante du cyclisme, l’UCI, a établi que les vélos de course sur route doivent être fabriqués de cette façon, de sorte que le marché a largement emboîté le pas.
« Pour l’usage général du cyclisme », ajoute Schwab, « c’est une bonne conception et ça marche. C’est à taille humaine, c’est pratique, pas trop gros, pas trop lourd. Mais il y a place à l’amélioration et la famille des vélos est plus grande que ce que nous avons vu jusqu’à présent.
Dans une conférence TED de 2012 (ci-dessus), Schwab discute de la recherche mentionnée ci-dessus et conclut en disant : « Ma vision est qu’avec des expériences minutieuses et des modèles informatiques validés, nous pouvons passer de cette évolution du vélo du 19e siècle à celle du 21e siècle. révolution du vélo.
Un exemple qu’il donne est la création de conceptions plus stables qui peuvent aider les personnes âgées à éviter de tomber lorsqu’elles font du vélo.
Quelques nouveaux dessins
Malgré l’enthousiasme de l’équipe, ses conclusions ne sont pas encore bien acceptées par l’establishment cycliste.
« La fabrication n’est pas une science », poursuit Papadopoulos. « Pour presque toutes les innovations, l’entreprise aimerait que les clients achètent un nouveau produit. Les fabricants ne sont que rarement des innovateurs, dans un sens significatif. Du moins, c’est mon point de vue extérieur à l’industrie. Ils veulent faire du profit. Et nous ne leur montrons pas un produit fonctionnel, mais seulement des idées.
Cependant, Papadopoulos et son équipe ont prouvé que les deux études précédentes n’étaient pas précises. Leurs dernières découvertes sont maintenant accueillies par ceux de l’industrie de la construction de vélos avec enthousiasme et quelques hésitations.
« La théorie est incroyable », déclare Phil Dempsey, responsable de l’ingénierie pour la marque de vélo britannique Aprire, « et les équations semblent avoir fonctionné, mais la conception, pour le moment, serait trop radicale pour le consommateur. »
Markus Storck, fondateur de Storck Bicycle, convient que la recherche est intéressante d’un point de vue technique, mais ne changera probablement pas la façon dont la plupart des vélos sont conçus. Il souligne en particulier le besoin réel d’une répartition centrale du poids.
« Tous ceux qui ont fait tourner leur roue arrière sur un VTT en montée savent exactement à quel point la répartition du poids est importante, même un centimètre environ peut faire une grande différence. De même, en descente sur un vélo de route, un cycliste a besoin de récupérer son poids pour être stable. Il dit que, pour lui, les concepteurs de vélos « ont réussi du premier coup avec le vélo de sécurité ».

Les conceptions praticables proposées par Schwab et al incluent un vélo qui se dirige depuis la roue arrière, mentionné dans la conférence TED ci-dessus (environ 14 minutes). Papadopoulos affirme qu’un cycliste expérimenté peut maîtriser cet engin en quelques minutes, et il ajoute que cela crée des possibilités pour construire des vélos plus stables qui peuvent aider à réduire le nombre de personnes qui tombent de leur vélo.
Comme vous pouvez le voir sur la photo ci-dessus, les roues sont de tailles très différentes, et il est difficile de dire si cette conception sera plus confortable ou efficace pour un cycliste bien entraîné. Ce qui nous ramène à un point antérieur – que la conception des vélos n’a pas fondamentalement changé depuis plus de cent ans, et pas seulement parce que nous ne comprenons pas pleinement la physique impliquée. Il se pourrait aussi que la conception originale du « vélo de sécurité » soit si bonne qu’elle réponde aux besoins de la plupart des gens.
Non pas que cela dissuade Papadopoulos, cependant. « La conception de vélos au cours des dernières décennies est restée assez archaïque par rapport à d’autres technologies d’autres industries telles que l’armée ou l’automobile », ajoute-t-il. « C’est notre problème en tant qu’ingénieurs, nous restons bloqués et nous ne progressons pas et c’est pourquoi la conception des vélos est restée là où elle est. »
Pour en savoir plus sur le projet, rendez-vous sur la page Web Bicycle Dynamics gérée par le professeur Arend Schwab.




